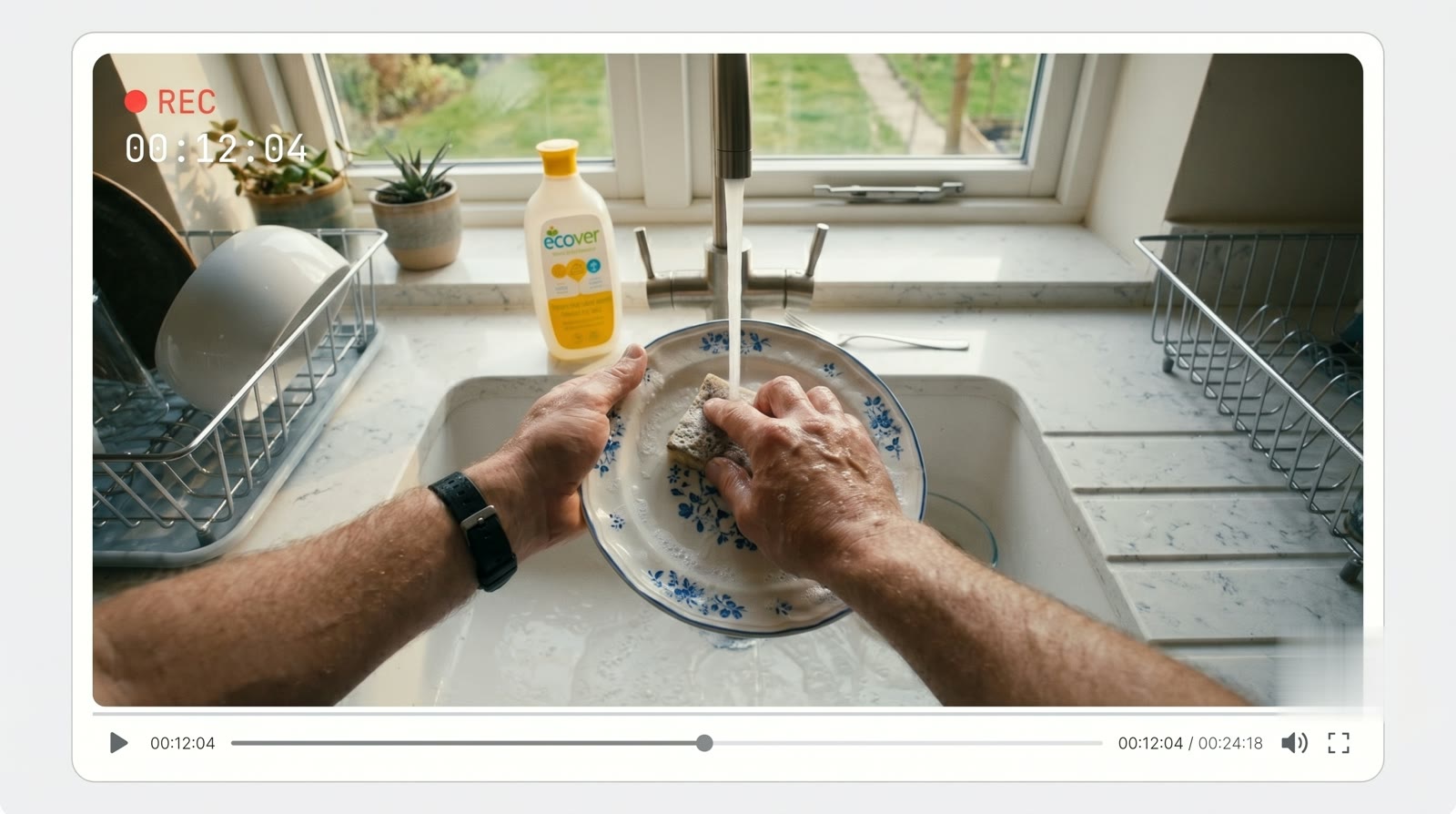
A robot does not observe its own work from across the room. It acts from inside its own body, viewing the scene through cameras placed roughly where its eyes would be, with its hands entering the frame from below to perform the task. This is the frame of reference a manipulation policy operates in, and it raises a concrete question for anyone assembling training data: should the demonstrations a policy learns from match that viewpoint, or contend with it?
Most video on the internet contends with it. It is shot in third person, from a tripod or a propped phone, framing a person from the outside. Such footage reads clearly to a human viewer while conveying little about what a policy should do with its own hands. The alternative is egocentric video: first-person capture from a head-mounted or body-worn camera that observes approximately what the actor observes. This article sets out why egocentric video, paired with synced motion, is a strong substrate for embodied AI.
Third-person video is not without value, and it retains a role in many pipelines. The argument is one of alignment: the closer the data sits to the robot's own point of view and its own degrees of freedom, the less a policy must infer unaided, and the more reliably it transfers off the bench and into a real home.
Viewpoint alignment: learning from where the robot stands
A policy maps observations to actions. When training observations come from a viewpoint the robot will never occupy, the policy must perform a coordinate transform it was never taught and cannot directly observe. Third-person video shows a hand reaching across a table from the outside; the robot, looking down its own arm, sees something materially different: the back of a gripper, an object growing in the frame, a target it must localise relative to itself rather than relative to an observing camera.
Egocentric capture closes that gap. The contributor wears the camera, so the visual stream recorded during demonstration approximates the visual stream the robot receives at run time: a comparable height, a comparable forward-and-down gaze, the same hands entering from the bottom of the frame. The policy learns in the coordinate system it will deploy in. This alone removes a familiar class of failure, in which a model that performs well in evaluation degrades the moment the camera is relocated to the robot's head.
Viewpoint alignment also improves attention. In first person, the camera follows the work. People fixate on what they are about to touch a beat before contact, so the frame naturally centres the object of interest and the relevant clutter while excluding the rest. The data is, in effect, pre-attended by the person performing the task, whereas a third-person rig has no means of identifying what matters and frames the scene uniformly.
The hand-object signal third-person footage loses
Manipulation is, at its core, a sequence of contacts: approach, grasp, hold, reorient, place, release. The decisive information is dense and small, and much of it resides at the hands, in how the fingers wrap a handle, the instant contact is made, or how grip adjusts when a full kettle proves heavier than expected. First-person video positions the camera close to this action and holds it there for the duration of the task.
Third-person framing loses this signal in three predictable ways:
- Occlusion. The body, the arm, and the object block the camera's line to the contact point at the moments that matter most, and the hand frequently disappears behind the torso precisely as the grasp closes.
- Scale and distance. From across the room, the hands occupy a small, low-resolution patch of pixels, and the fine detail of finger placement and contact timing is not resolvable at that scale.
- Limited frame of reference. A third-person clip locates the hand within the room but conveys little about where the object sits relative to the hand and eyes. For a policy that acts from its own body, the latter framing is the one that carries the action.
Third-person video also conveys little about intent. It records the exterior of a movement but not the gaze that preceded it, the small corrective adjustments, or the sequence in which a person elected to act. Egocentric video, anchored to the actor's own view, captures the approach and the recovery alongside the success. For a model learning hand-object interaction, that surrounding context is the lesson, not the noise.
Third-person video records that a task occurred; egocentric video records how it was performed: where the eyes moved, when the hands made contact, and what the body did to recover when the grip slipped.
Motionstack
What the large egocentric datasets unlocked
This is not a novel hypothesis. The research community has spent much of the past decade building egocentric corpora, in part because the first-person view preserves signal the third-person view discards, and each release has advanced the field.
Epic-Kitchens provided an early demonstration. By recording people cooking in their own kitchens with head-mounted cameras, unscripted and untrimmed, it produced a benchmark dense with hand-object interactions and fine-grained actions. It rendered action recognition and, notably, action anticipation more tractable as research problems, because the data contained the moment-to-moment detail those tasks require.
Ego4D scaled the approach to thousands of hours of daily-life activity, captured across hundreds of participants in dozens of countries. It established that breadth of first-person experience, spanning many people and places, is a distinct and frequently more valuable asset than depth from a single setting. Its benchmark suite introduced episodic memory, hand-and-object forecasting, and anticipation, each of which depends on the first-person frame.
EgoExo4D contributed an element particularly relevant to robotics: synchronised egocentric and exocentric capture of the same skilled activity, recorded simultaneously. Pairing the actor's view with calibrated outside views allows a model to relate first-person observation to full-body context, and provides a principled way to study how skill transfers across viewpoints. That pairing serves as a bridge between how humans demonstrate and how a humanoid must reason about its own body.
The trajectory across these efforts is consistent. The first-person view is much of what made action understanding and anticipation work, and broad, diverse first-person capture is much of what enabled the resulting models to generalise. The properties that advanced video understanding are the properties manipulation policies require.
Anticipation, not only recognition
A useful robot does more than label what is happening; it anticipates what comes next so it can prepare. Anticipation is difficult to learn from third-person clips, because the cues are subtle and local. People telegraph their next action through gaze and small preparatory hand movements, and those cues are most legible from inside the first-person view.
Egocentric data captures the lead-up: the eyes settling on the cupboard handle, the hand pre-shaping for the grasp, the body shifting weight before the reach. A policy trained on this learns the rhythm of a task rather than a snapshot of its midpoint. The anticipation benchmarks introduced by Epic-Kitchens and Ego4D exist precisely because this signal resides in first-person video and is difficult to recover elsewhere. For a robot that must plan a beat ahead to move smoothly, that lead-up is the part worth learning.
Why pixels alone are insufficient: the role of synced motion
First-person video gives a policy a strong view of a task, but video alone is ambiguous about action. Two clips can appear nearly identical while the hands perform different operations, and a 2D frame flattens the depth a gripper requires to act. To convert a recording into a demonstration a policy can imitate, the action must be recovered explicitly and attached to the pixels.
This is the role of synchronised motion. Alongside the egocentric video, we derive hand pose and depth with camera ego-motion, time-aligned frame for frame, so that each moment carries both what the actor saw and what the actor did. The result reads as a trajectory in the robot's own terms rather than an image to be inferred:
- Pose recovers the joint and hand configuration over time, so the action is an explicit trajectory the policy imitates rather than an estimate derived from appearance.
- Depth disambiguates the 3D geometry a flat frame conceals, which is much of what a gripper needs to approach and contact an object.
- Tight synchronisation keeps observation and action in step, so the policy learns the true mapping from what was seen to what was done, with negligible drift between the two streams.
Egocentric video supplies the viewpoint and a richer hand-object signal; synced motion supplies the action labels in a form a robot can reproduce. Together they constitute a demonstration: first-person observation paired with the movement it produced. That pairing is much of what we mean by the substrate, and part of why we treat motion as a first-class output rather than something to reconstruct after the fact.
A practical capture setup: one rig, many people, real homes
If the substrate is egocentric video plus synced motion, the next question is how to capture it so the data is both diverse and usable. The guiding principle is the one that holds across much of robot learning: vary what should vary, and hold constant what should not.
A head-mounted, standardised rig is the natural choice. Worn on the head, it tracks the gaze, keeps the hands in frame, and matches the robot's eventual point of view. Standardisation fixes the camera placement, field of view, frame rate, and sensor configuration, so clips are comparable and a model can separate task variation from capture noise. Deploying the same rig across many people performing the same tasks in their own homes provides the diversity that supports generalisation, without the inconsistency that ad hoc phones and angles introduce.
This is also why the data was never simply available online. The internet's how-to videos are edited, third-person, unsynced, and produced for an audience, and they carry no consent for commercial AI training. What a manipulation policy needs is unedited first-person captures of ordinary people performing ordinary tasks, with motion attached and rights cleared. That is a sourcing problem rather than a scraping one: securing the right person, in the right place, on a consistent rig, to record the right thing. It is principally logistics, and logistics can be engineered at scale.
How this connects to cross-embodiment learning
A parallel pattern appears in the robot datasets. Open X-Embodiment demonstrated that pooling diverse, real demonstrations across robots and scenes improves transfer more than deepening any single narrow set, and RT-2 showed that grounding action models in broad visual diversity helps them handle novel objects and instructions. Diverse, first-person, motion-paired human demonstrations sit upstream of that work: they are the human side of the same generalisation argument, captured in the frame the policy will deploy in.
What to specify when first-person data matters
When scoping data for a manipulation or humanoid policy, specify the viewpoint and the motion as deliberately as you specify the task itself. A sound specification names:
- First-person, head-mounted capture, so the demonstrations match the frame the robot deploys in.
- Synchronised motion: which of pose and depth you require, and how tightly it must be aligned to the video.
- The hand-object interactions that matter most, including the contacts, the lead-up, and the recoveries you want represented.
- The person and place distribution: how many distinct contributors and homes, across which demographics and layouts.
- A held-out slice, by person or place, that tests whether the policy generalises rather than memorises.
When viewpoint and motion are part of the specification, the deliverable changes form. It becomes less a pile of raw footage and more a set of demonstrations a policy can imitate directly, captured from the point of view it will work from.
If you are training a generalist manipulation policy and want demonstrations in the frame your robot acts from, with motion synced and rights cleared, tell us the spec. We field the right people, in real homes, on a consistent head-mounted rig: first-person where it counts, and standardised where it helps.
References & further reading
- Ego4D: Around the World in 3,000 Hours of Egocentric Video
- EgoExo4D: Understanding Skilled Human Activity from First- and Third-Person Perspectives
- Epic-Kitchens: Large-Scale Egocentric Dataset of Daily Kitchen Activities
- Open X-Embodiment: Robotic Learning Datasets and RT-X Models (2023)
- RT-2: Vision-Language-Action Models (2023)